多阶段机器人系统,提高MRI引导立体定向神经外科手术精度
多阶段机器人系统,提高MRI引导立体定向神经外科手术精度
约翰霍普金斯大学的Zhuoliang He及其同事进行了一项开创性研究,代表着将机器人技术与术中磁共振成像(MRI)紧密结合,以显著提高立体定向神经外科手术精度的重要进展。该研究于2023年12月10日发表,介绍了一种创新的机器人系统,巧妙地将手动灵活性与自动微调相结合,通过软机器人技术,精确定位生物切片针和电极等工具,用于脑部手术。
MRI具有提供高分辨率的3D神经血管结构和病变图像的能力,但通常仅限于术前和术后评估。从立体定向框架设置、图像配准和脑移位中逐渐积累的定位误差限制了神经外科手术。约翰霍普金斯大学的研究力求超越这些局限,充分利用术中MRI实时监测和手术过程中工具跟踪的能力,需要精确和动态的定位工具。
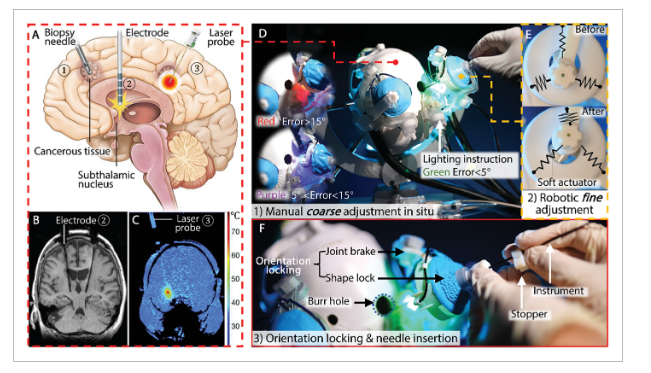
得到的机器人系统在几个方面具有创新性。首先,它采用了两阶段定位方法:初步交互式手动粗调整,允许外科医生在±30°的工作空间内控制,然后是自动微调的创新。这种自动调整具有令人印象深刻的规格,实现了小于0.2°的定位误差、1.4 Hz的响应速度和0.058°的定位微分辨率。通过精心设计和优化软机器人驱动器架构,以及在机器人系统的两个阶段中配备强大的定位锁定机制,它实现了这样高精度和响应速度。
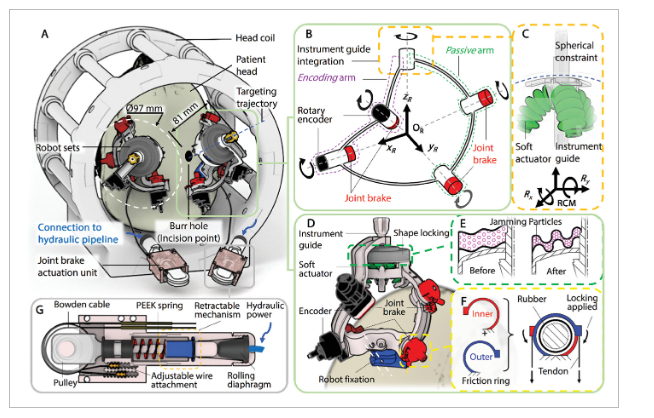
这个头部植入的机器人定位器重量仅203克,尺寸为Ø97毫米×81毫米高,适用于大多数标准MRI头线圈,并保持单侧和双侧手术的灵活性。此外,它无缝整合了定制无线全向跟踪标记,以确保准确的MRI配准,这是适应术中MRI扫描实时迭代特性的一个重要方面。
该系统的全面验证流程包括基于实验室的精度评估和基于MRI的测试,涉及头骨模型和尸体主体——所发现的定位误差分别小于0.8毫米、1.7毫米和2.2毫米。重要的是,这些验证结果得出结论,机器人不会影响MRI图像质量或产生电磁干扰,确认了它在MRI环境内的兼容性和安全性。
除了工具定位外,该设备的新特性有助于简化设置和使用,适应双侧手术,并减少患者的痛苦。其两阶段调整过程无缝地融入外科流程,从而提高效率,可能缩短手术时间。它设计有交互式的灯光信号,帮助外科医生进行手动调整,以及精细调整期间对仪器导向的方向进行锁定的颗粒状卡榫机制。
这项工作的结果阐明了一个引人关注的故事,可能改变立体定向神经外科领域。该研究通过开发一种半自动化的机器人系统,将外科医生的手动技能与机器人和MRI引导的精确性相结合,克服多年来困扰神经外科手术的挑战,做出了重大贡献。该系统优先考虑紧凑的外形,保持轻量和直观的设计,不会在自动化或工作空间覆盖方面妥协。
展望未来,虽然已经显示出成功,但该论文强调了进一步增强的潜力。探索更可靠的制造技术、改进运动学模型以及整合更先进的控制系统被建议为下一步。尽管如此,该系统展现了临床相关性和在神经外科中扩大机器人辅助的巨大潜力,将该领域推向一个精度和安全性融合的新视野。
总之,约翰霍普金斯大学团队的方法代表了神经外科、术中成像和机器人工程的协同融合。这项研究有潜力为神经外科医生提供一种工具,能够最大程度地减少风险,最大限度地提高需要毫米级精度的干预效果。随着临床采用的推进,这项研究的影响可能不仅仅局限于实验室,而将超越全球手术室,提高患者护理水平,并重新定义手术精度的边界。